实验目的:
1,两台ROS之间启用OSPF协议,宣告自身网段。
2,重分布静态路由到OSPF中。
下面是拓扑图:
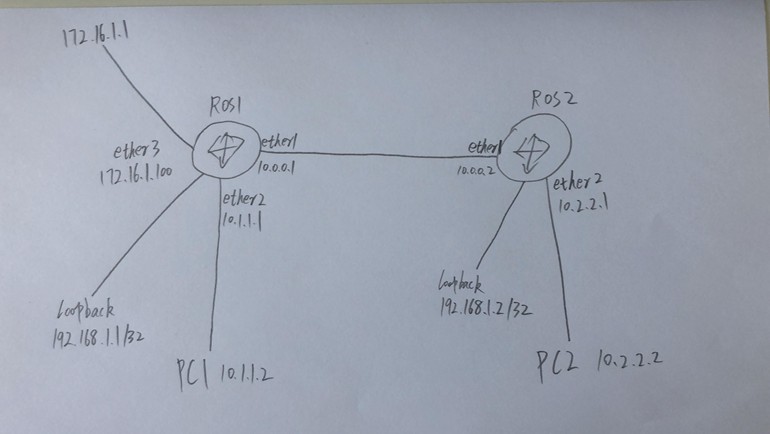
如图所见,有ROS1和ROS2两台路由器,均使用ether1接口互联,ROS1的IP地址是10.0.0.1,ROS2的地址是10.0.0.2。
均使用ether2连接PC,ROS1的地址是10.1.1.1,ROS2的地址是10.2.2.1。
连接ROS1的PC的IP是10.1.1.2,连接ROS2的PC的IP是10.2.2.2。
出口在ROS1的ether3接口,该接口IP是172.16.1.100,下一跳是172.16.1.1。
上述各网段均使用24位掩码。
两台路由器均使用vif1作为loopback,ROS1的loopback地址是192.168.1.1,ROS2的loopback地址是192.168.1.2。
上述loopback地址作为管理地址和router-id使用,掩码都是32位。
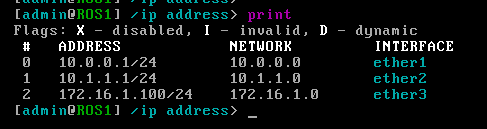
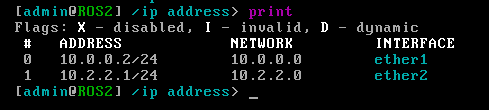
1,给ROS接口配置地址。当前只给物理接口配置了IP,虚接口还未创建。
2,在ROS1上创建vif1接口。
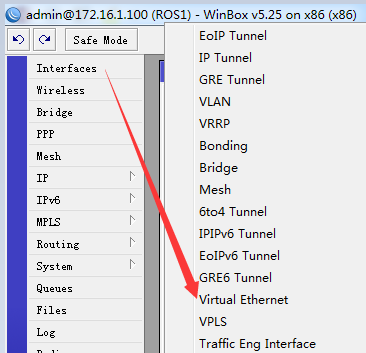
选择interface–>virtual ethernet选项。
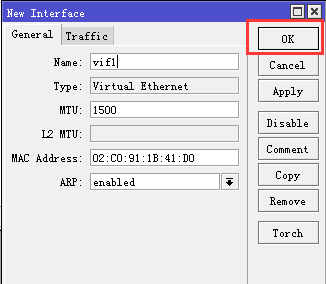
设置name为vif1,点击OK。
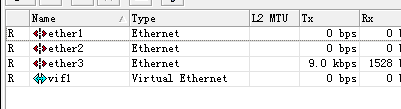
虚接口配置完成。
3,给ROS1的vif1接口配置IP192.168.1.1/32
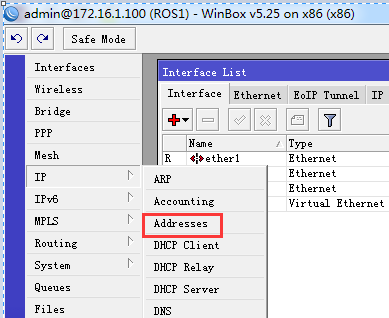
选择ip–>addresses选项
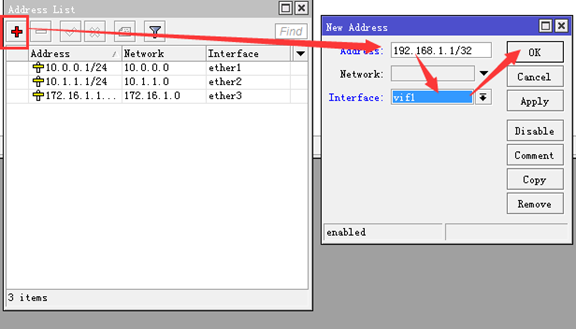
点击+,在Address中设置ip,interface选择虚接口vif1,点击OK。
4,ROS2照此配置。
5,在ROS1上配置OSPF实例。
选择routing–>ospf
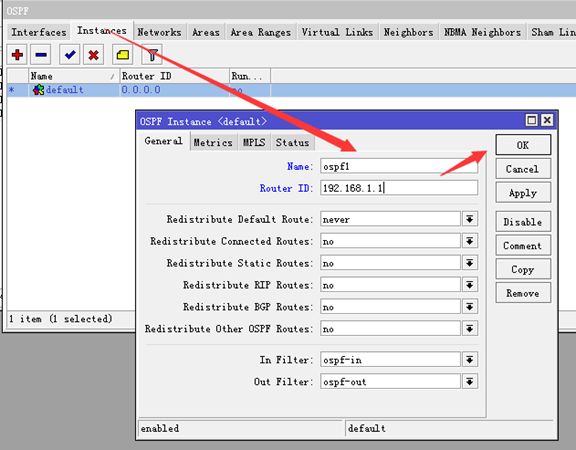
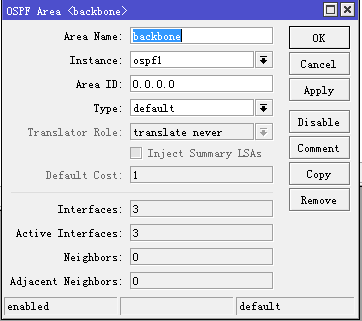
instances标签中,配置默认存在的default实例,router-id设为192.168.1.1。默认area-id是0,不做配置。
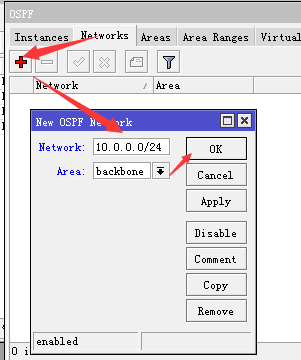
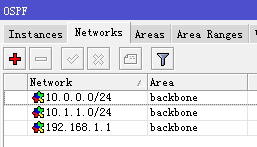
networks标签中,点击加号增加路由器上有所拥有的网段进行宣告。注意这里不要增加172.16.1.0/24,这个网段是静态路由重分布网段,不参与OSPF路由。
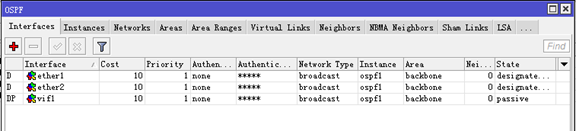
回到interfaces标签,即可看到已进行OSPF宣告的网段所在的接口。如果没有,请检查接口IP和OSPF宣告是否正确。
6,在ROS2上配置OSPF实例。
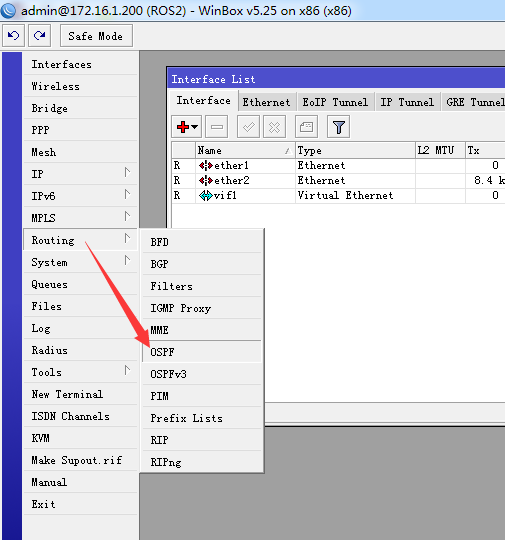
选择routing–>ospf
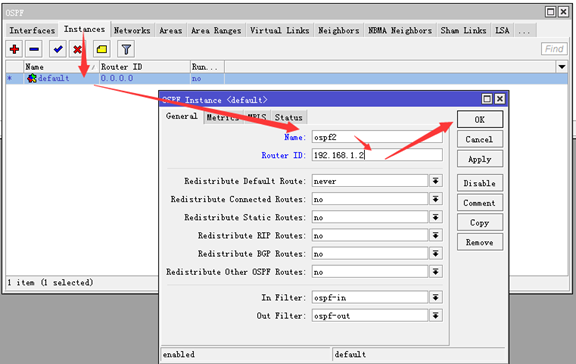
instances标签中,配置默认存在的default实例,router-id设为192.168.1.2。默认area-id是0,不做配置。
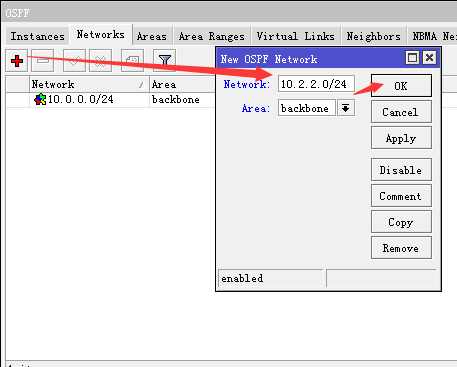
networks标签中,点击加号增加路由器上有所拥有的网段进行宣告。
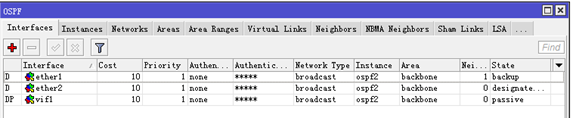
回到interfaces标签,即可看到已进行OSPF宣告的网段所在的接口。如果没有,请检查接口IP和OSPF宣告是否正确。
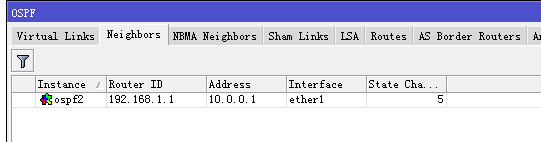
7,宣告网段后即可在neighbors标签中看到邻居。
8,配置两台PC,并接入到对应ROS的ether2接口。
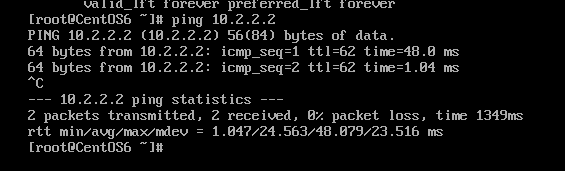
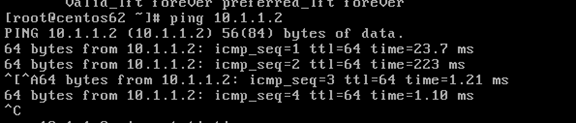
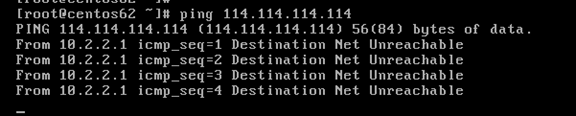
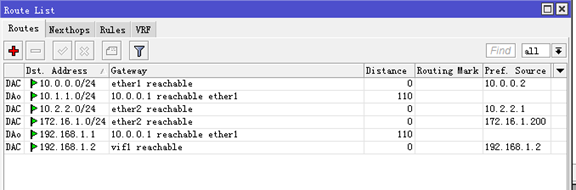
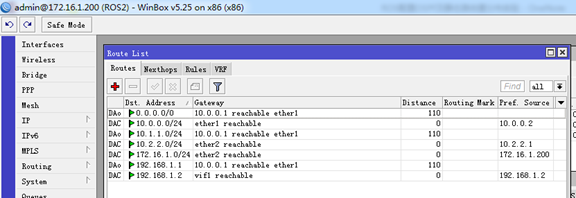
9,此时互ping是通的,但到公网不通。提示目标网络不可达,因为上面配置ospf时只进行了网络宣告,并未配置路由重分布。看路由表只有已宣告网段,没有默认路由或去往其它网段的信息。
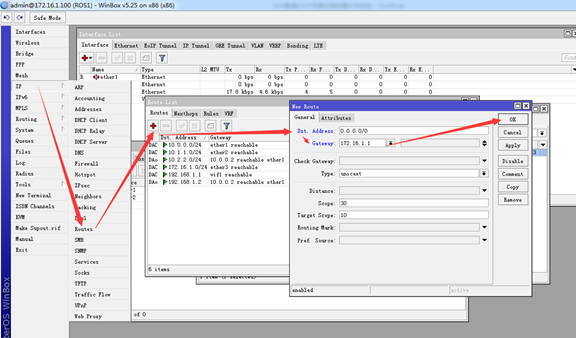
10,在ROS1增加默认路由。
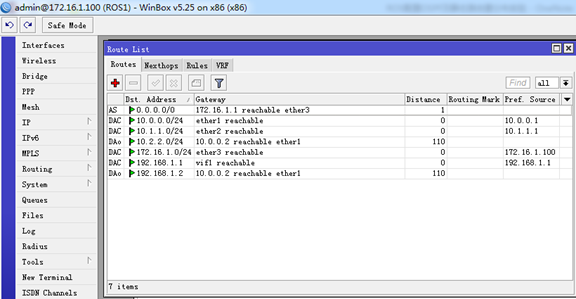
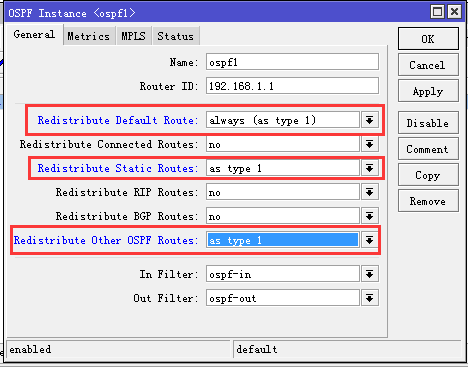
11,ROS1的OSPF实例配置,将重分布默认路由,重分布静态路由,重分布其它OSPF路由选项设置为as type1。再看ROS2的路由表,已经出现默认路由,下一跳是10.0.0.1。
12,PC2已经能访问公网,traceroute看到数据包经过了ROS1。
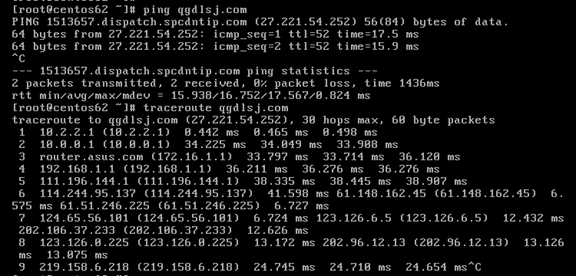
配置完成。