本文目的是通过ROS VRRP实现HA,故障自动接管,非VRRP多播。适用于具备多出口及有高可用需求的网络环境,热备组中的某台设备出现故障后,同组内其它设备自动对业务进行接管,保证网络不会中断。
ROSA的IP是10.200.200.2,使用ether-2接口
ROSB的IP是10.200.200.3,使用ether-2接口
VRRP的VIP是10.200.200.111
其中10.200.200.1正在使用,不在文档范围内,文档中全部掩码如无说明都是/24。
操作方法如下:
ROSA
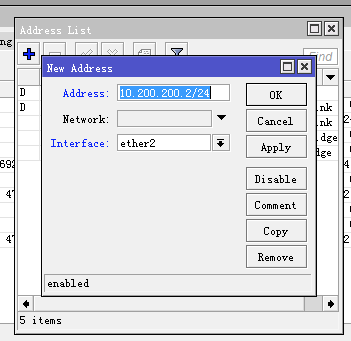
1,在ether-2接口增加IP10.200.200.2。
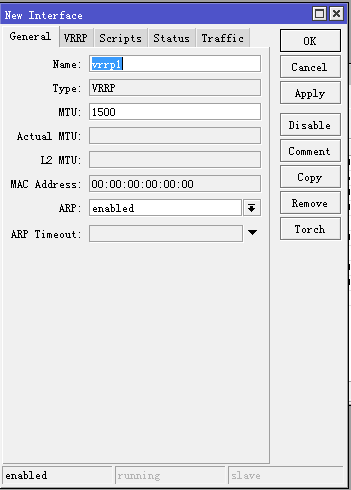
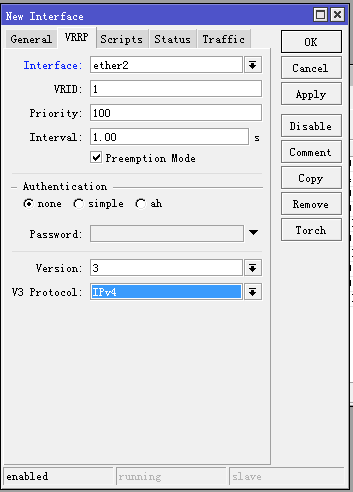
2,创建VRRP组,General标签中name可随意填写。VRRP标签中指定接口ether-2;VRID指定VRRP组ID,同一VRRP组中VRID需相同。Version选择版本3,指定IPv4。
此时看到vrrp虚接口已经生成,由于没有IP地址,显示为红色且不可使用。

3,给VRRP配置VIP10.200.200.111。看到vrrp虚接口变为黑色则配置成功。

至此ROSA配置完成,下面开始ROSB配置,由于步骤相同,不再重复截图。
4,在ether-2接口增加IP10.200.200.3。
5,创建VRRP组,General标签中name可随意填写。VRRP标签中指定接口ether-2;VRID指定与ROSA相同的VRID。Version选择版本3,指定IPv4。
6,给VRRP配置VIP10.200.200.111。看到vrrp虚接口变为黑色则配置成功。

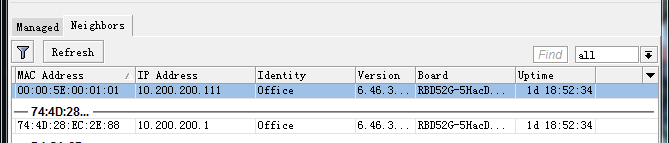
至此全部配置完成,可通过winbox看到VRRP VIP已经出现,MAC与两台ROS均不同。
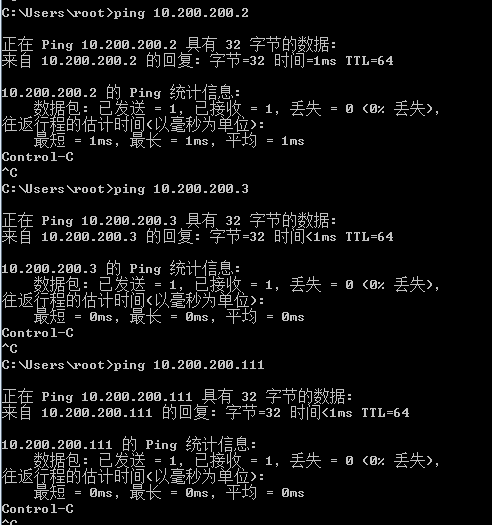
下面进行故障测试,首先验证三个IP全都通。
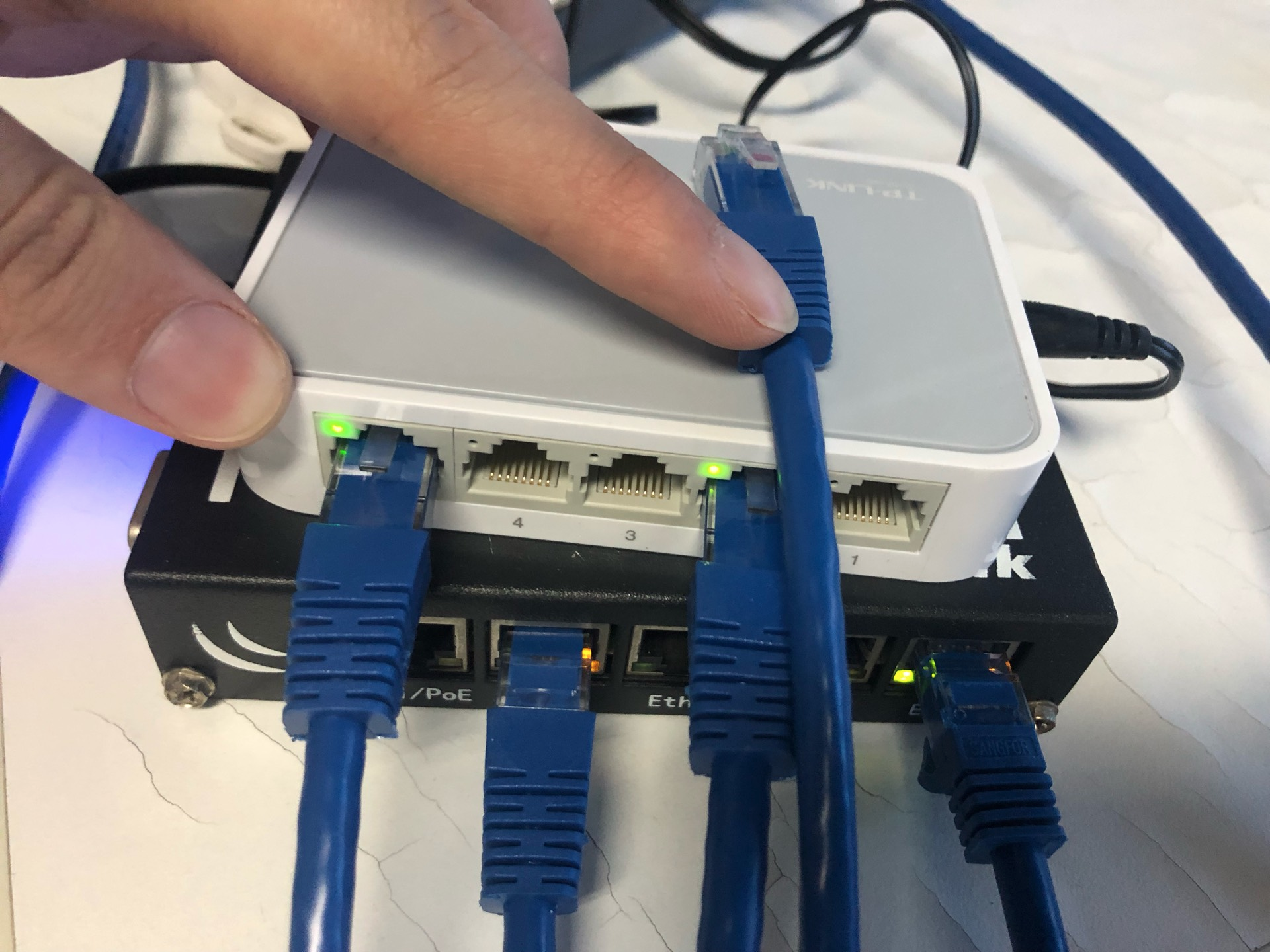
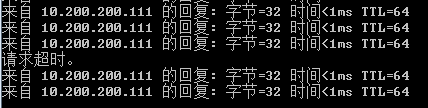
测试方法是发起到10.200.200.111的ping,然后拔掉某台ROS进行故障测试。如下图我拔掉ROSA的网线,看到发生丢包,到VRRP VIP依旧正常。
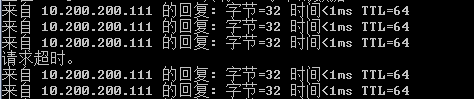
现在把ROSA接回,拔掉ROSB,依旧是发生丢包,到VRRP VIP正常。

看ROS上出现了接管日志。
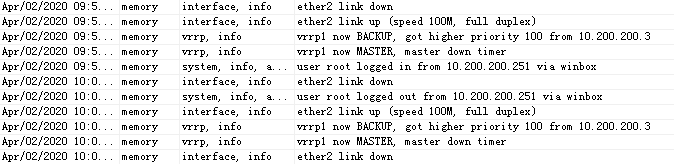
自动接管测试通过。
本文链接地址: https://danteng.org/ros-vrrp-ha/